[摘要]自动驾驶的毫米波雷达虽然可以检测静止物体,但滤波算法会有意去除检测到的静止物体。
(本文由知乎答主“迪迪”撰文,腾讯科技整理,作者系小鹏汽车大数据工程师。)近日,特斯拉又出事了。6月1日,一辆特斯拉Model 3以110公里的时速,直直撞上了高速路上侧翻的大货车。而这已不是Model 3第一次撞上大货车了,早在2019年,一辆Model 3就撞上了侧翻在路上的半挂货车,导致车主丧生。这样“低级”的事故究竟是为何发生的?据报道,经警方证实,这次事故又是AutoPilot的锅。事故发生时,车辆处于AutoPilot开启状态,时速110公里,所幸该事故未造成人员伤亡。特斯拉的自动驾驶为何会犯这种“低级”错误?这样的事故该由谁来担责?对此,知乎答主小鹏汽车大数据工程师“迪迪”认为,这辆Model 3之所以会撞上静止的大货车,一方面应该是AutoPilot的摄像头识别出现问题。
摄像头的所有能力都是由数据赋予的,也被数据束缚。另一方面,
毫米波雷达虽然可以检测静止物体,但滤波算法会有意去除检测到的静止物体。所以在远处高速接近的特斯拉此时对这辆侧翻的货车是没有任何感知的。至于自动驾驶造成的车祸责任,该答主表示,在全球现行的任何法规中,出事故永远不可能归责于自动驾驶系统,驾驶员是唯一的责任主体。
以下为“迪迪”的对这起交通事故的回顾和复盘,腾讯科技稍作整理:一. 事故情况的复盘第一阶段: 150m摄像头:由于货车是翻倒的,可以预见这种类型的训练数据应该极少,所以摄像头识别出现问题。
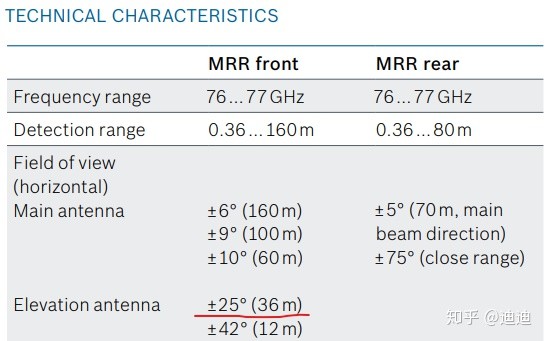
毫米波雷达:由于是静止物体,毫米波雷达在做后处理的时候滤波滤掉了这个信号,所以在远处高速接近的特斯拉此时对这辆货车是没有任何感知的。(AP2.5及以上采用大陆(Continental AG) ARS410,有效距离170m。)
减速:无

第二阶段:30m摄像头:状态同上。
毫米波雷达:大陆这颗MRR具体参数未知,但是参照博世4代MRR的水平,应该也装备了一个Secondary Elevation Antenna,这个天线的感知高度矮,勘测距离近,且FOV宽,用于AEB,行人检测,和加强对静止物体的识别能力。这里还查到了teslamotorsclub的老铁曾经透露过AP2.5的can信号中出现Secondary MRR字样,也应证了上述看法。

3)New radar sensorfrom Continental ("Radar Front Conti") with "primary" and "secondary" CAN-signalling to AP2.5ECU.Exciting!
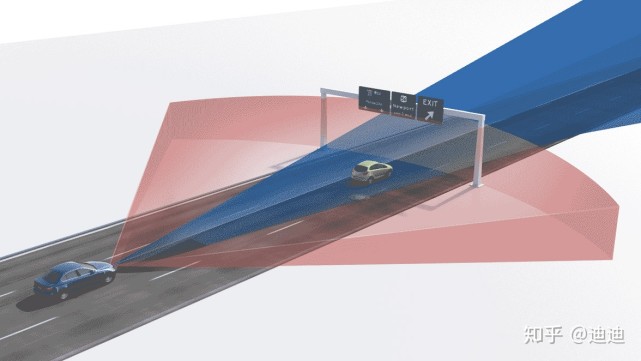
红色即是第二个天线的探测范围继续借鉴Bosch毫米波的参数表猜测,这个elevation天线大概是36m的检测能力。
所以在理论上这个时候,这个天线可以让AP意识到障碍物,AEB可以开始介入。然而,按照媒体所说的110kmph的速度和36m的距离,
留给AP的时间只剩下了短短的1秒钟。
减速:疑似有制动动作。地上有轮胎制动的白烟。
新闻更新:车主称自己踩了刹车第三阶段:撞击。首先,根据台媒,
没有人员受伤,司机无恙。再来看看车头:

从这个溃缩程度,真正撞击的速度应该不高,即使考虑到货车的车厢硬度,目测50或者更低,也就应证了第二阶段开始持续刹车的判断。再来看看驾驶室:

可以看到方向盘完整,气囊都没有爆,更加说明了碰撞烈度不高,没有达到气囊起爆条件。
二. 事故原因的分析首先,毫米波雷达并不是不能检测静止物体。毫米波雷达:事实上,静止物体是有意被滤波算法去除的,毫米波雷达对速度的感知是通过多普勒效应来实现的,所有物体都会产生回波,而只有去除杂波,才可以关注于真正需要跟踪的物体,一旦这个物体被跟踪上,即使它突然停住,雷达依然对它保持持续“关注”。

如果不去掉静止物体,车就会在隧道口刹停现在量产毫米波雷达的信号天线基本只在二维方向上装备,即使有了elevation天线,对检测到的物体依然缺少高度信息,这使得街上的路牌,路边的花坛,甚至停车场的举起来的杆,隧道前的墙很难与路面上的车区分开,所以为了关注路面上的车,不得不去掉静止物体产生的回波。
摄像头:摄像头的所有能力都是由数据赋予的,也被数据束缚。
见过路上有大象的人估计没多少,这种数据怎么采集?没有数据就会导致系统识别问题,场景再少也不意味着现实中没有可能出现。没有遇到之前可能是99.999%的可靠性,遇到了那就是100%的事故。特斯拉在自动驾驶数据采集方面,是绝对的业界龙头,waymo的资金拉满也就支撑600辆车的车队,特斯拉是第一个实现数据闭环,实现由用户直接贡献数据的模式,数据量如此大也顶不住一辆侧翻的货车。
这就是自动驾驶中经典的长尾效应。事实上由于长尾效应,自动驾驶系统不可能100%安全,这一点必须被认识而且接受。你可以无限往99.9之后加9,但是你永远也无法得到100。
三. 自动驾驶系统的责任和义务四. 总结上一条并不是漏写,
自动驾驶系统没有任何责任和义务。自动驾驶系统没有任何责任和义务。自动驾驶系统没有任何责任和义务。在全球现行的任何法规中,出事故永远不可能归责于自动驾驶系统,驾驶员是唯一的责任主体。在L3法规完善并且明确划分驾驶员/系统责任归属之前,不可能有真正的L3级别车辆出现。无论是model 3也好,P7也罢,都适用这句话。其实我还认为购买FSD/XPILOT3.0的消费者需要强制上课,学习交警的事故警示课程,来一部自动驾驶失效集锦。目前的自动驾驶,用的好可以帮你节省一些开车的精力,让你有更舒服的高速体验(ACC,LCC,NGP),甚至更舒服的堵车体验(TJA),但是错误的使用方式,就会让你后悔一生。
“知乎精选”系一档针对热点新闻的解读和科普栏目,精选知乎答主的优质解答,为网友答疑解惑。

